Svejserobotserie


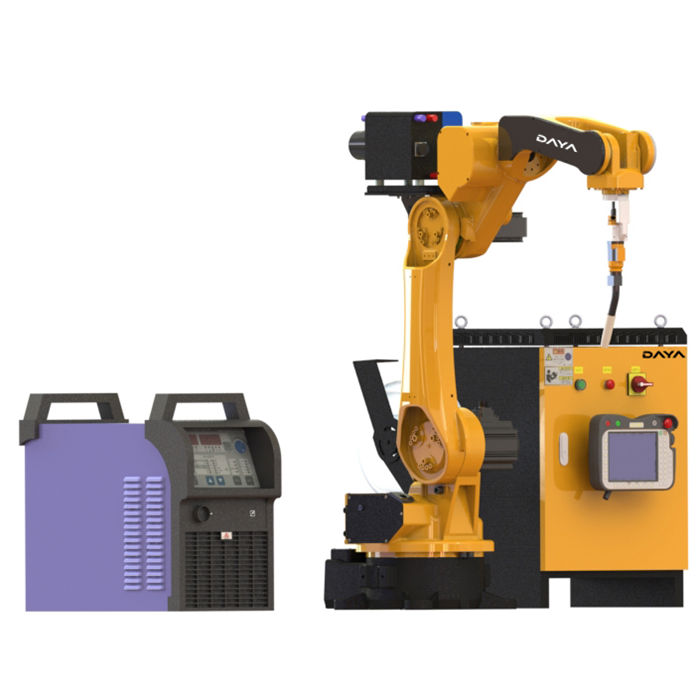

Svejserobot

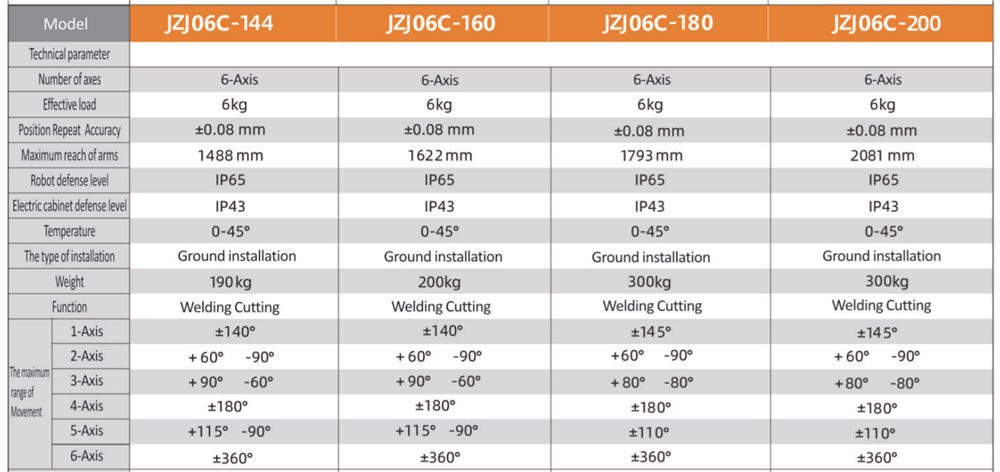
Svejserobotserie JZJ06C-180
Svejserobotserie JZJ06C-144

Svejserobotserie JZJ06C-160

Svejserobotserie JZJ06C-200
Kort introduktion
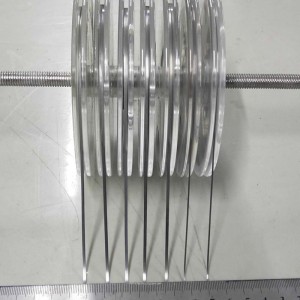
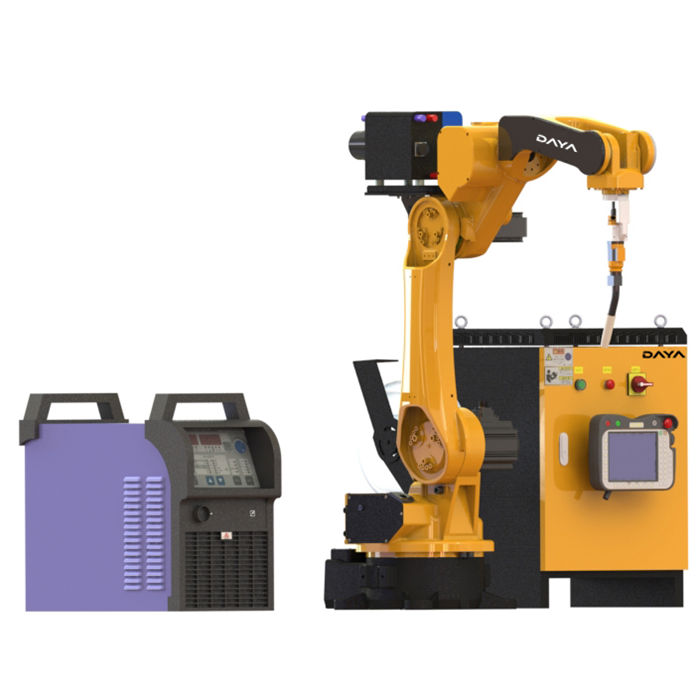
Svejserobot er en industriel robot, der beskæftiger sig med svejsning (inklusive skæring og sprøjtning). Ifølge definitionen af international organisation for standardisering (ISO), at industrirobot tilhører standard svejserobot, er industrirobot en multifunktionel, gentagelig programmerbar manipulator med tre eller flere programmerbare akser, som bruges inden for industriel automatisering. For at tilpasse sig forskellige applikationer er den mekaniske grænseflade for robotens sidste akse normalt en forbindelsesflange, som kan forbindes med forskellige værktøjer eller sluteffektorer. Svejserobot er at installere svejsetænger eller svejse (skære) pistol på endeakselflangen på industriel robot, så den kan udføre svejsning, skæring eller termisk sprøjtning.
Robotsvejsning er brugen af mekaniserede programmerbare værktøjer (robotter), der fuldstændigt automatiserer en svejseproces ved både at udføre svejsningen og håndtere delen. Processer såsom gasmetalbuesvejsning, selvom de ofte er automatiserede, svarer ikke nødvendigvis til robotsvejsning, da en menneskelig operatør undertiden forbereder de materialer, der skal svejses. Robotsvejsning bruges ofte til modstandssvejsning og lysbuesvejsning i høje produktionsapplikationer, såsom bilindustrien.
Robotsvejsning er en relativt ny anvendelse af robotik, selvom robotter først blev introduceret i den amerikanske industri i 1960'erne. Brugen af robotter til svejsning startede først i 1980'erne, da bilindustrien begyndte at bruge robotter i vid udstrækning til punktsvejsning. Siden da er både antallet af robotter, der er brugt i industrien, og antallet af deres applikationer vokset kraftigt. I 2005 var mere end 120.000 robotter i brug i den nordamerikanske industri, ca. halvdelen af dem til svejsning. [1] Vækst er primært begrænset af høje udstyrsomkostninger og den deraf følgende begrænsning til applikationer med høj produktion.
Robotbuesvejsning er begyndt at vokse hurtigt for nylig, og allerede kommanderer det omkring 20% af industrielle robotapplikationer. Hovedkomponenterne i buesvejsningsrobotter er manipulatoren eller den mekaniske enhed og controlleren, der fungerer som robotens "hjerne". Manipulatoren er det, der får robotten til at bevæge sig, og designet af disse systemer kan kategoriseres i flere almindelige typer, såsom SCARA og kartesisk koordinatrobot, som bruger forskellige koordinatsystemer til at dirigere maskinens arme.
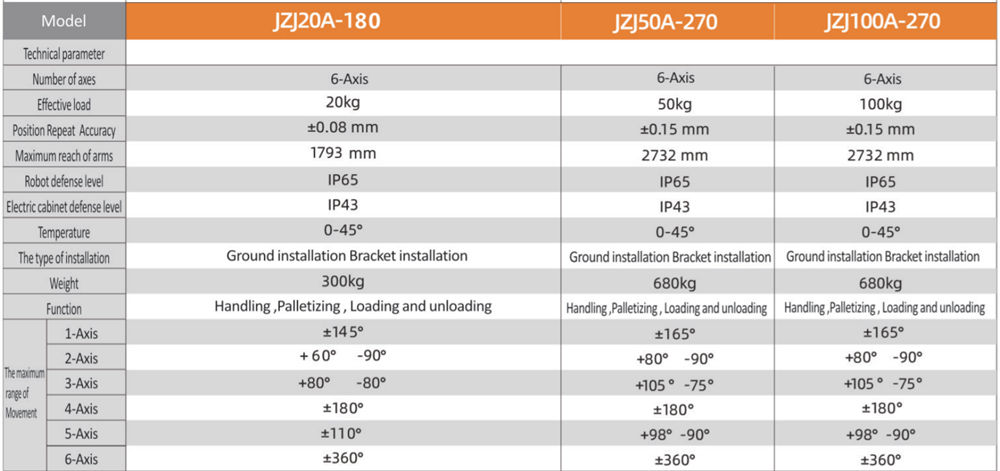
Svejserobotseriens tekniske parametre